|
Thesis information |
PhD thesis on Computer Science from the Technical University of Catalonia (AI program)
Realized at the Artificial Intelligence Research Institute (IIIA-CSIC)
Also published as Monografies de l'IIIA (Vol. 18)
Author: Dídac Busquets
Supervisors: Ramon López de Màntaras and Carles Sierra
Defense date: July 28, 2003
Online document:  HTML HTML
Complete document:  PDF (1.2 MB) PDF (1.2 MB)
|
|
Document by chapters:
|
Pictures, videos and more info:
|
 |
Contents, Acknowledgements and Abstract |
PDF (32 KB)
|
|
|
PDF (44 KB)
This chapter gives an overview of this PhD thesis, its motivations, objectives and
its main contributions. It also gives a list of the publications originated from the
research carried out during the completion of the thesis.
|
|
2. Related Work and State-of-the-art |
PDF (67 KB)
This chapter is devoted to relevant related work and state-of-the-art on the field of
autonomous robots for unknown unstructured environments. The relevant work
has been divided in two parts, one for each main thread of research of the thesis:
control architectures, and mapping and navigation methods. The relevant work
concerning control architectures gives an overview of the different approaches on
autonomous robots control, focusing on the behavior-based approach. Regarding
the mapping methods, we review and compare the two main approaches for map
building, the metric one and the topological one. A comparison between two dif-
ferent localisation approaches (landmark-based localisation and model matching)
is also given.
|
|
3. Mapping and Navigation |
PDF (113 KB)
In this chapter we firstly describe Prescott’s model for storing spatial relationships
among the landmarks of the environment. After that, we describe how we have
extended this model for dealing with imprecise information about the location of
the landmarks. We also present the algorithm for building a topological map of
the environment and how it is used to compute diverting targets, needed by the
robot when it is blocked.
|
|
4. The Robot Architecture |
PDF (172 KB)
In this chapter a general coordination architecture based on a bidding mechanism
is presented. We also present the particular instantiation of the general architecture
that we have used to solve the navigation problem. A detailed description of
the multiagent Navigation system is also given in this chapter.
|
|
5. Simulation Results |
PDF (349 KB)
In this chapter the results of the simulated experiments are presented. These experiments
include the testing of our architecture and the application of Machine
Learning techniques in order to improve the performance of the system. In particular,
we present the application of Reinforcement Learning, which we have used
to make the system learn how to appropriately use the camera, and an application
of Genetic Algorithms, used to tune some of the parameters of the agents of the
Navigation system.
|
|
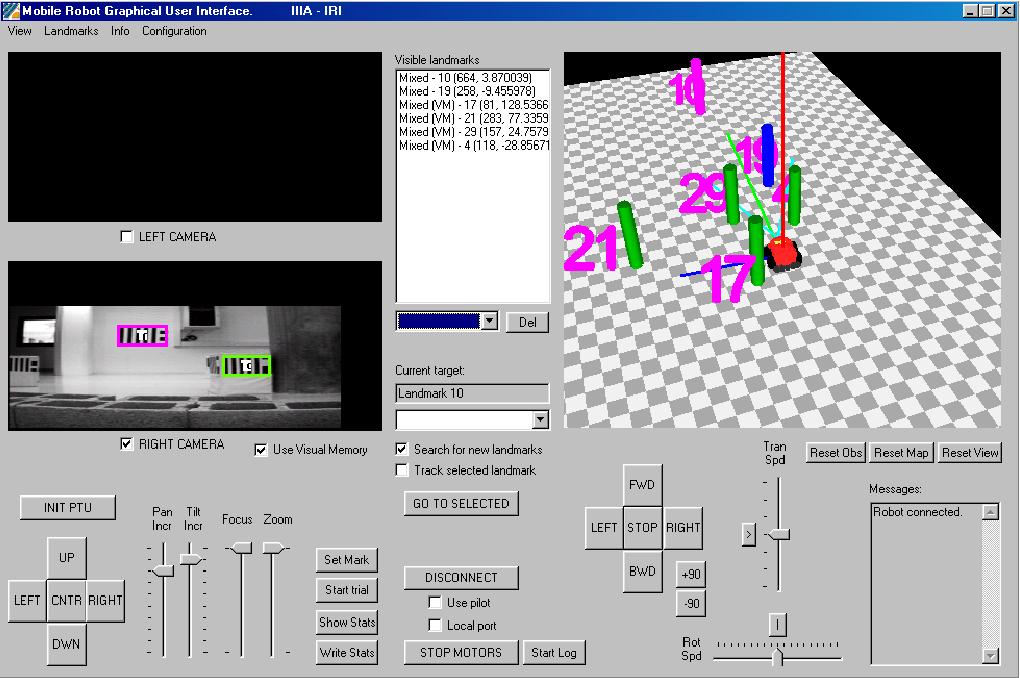
6. Real Experiments |
PDF (1,23 MB)
This chapter is devoted to present the results of the experiments on real environments
with a real robot. Firstly, the wheeled robot platform and a simple
vision system used for the real environments experiments are described. Then,
we describe the different scenarios in which the experiments have been carried
out. Finally, the results of the experimentation in such scenarios are given and
discussed.
|
|
7. Conclusions and Future Work |
PDF (39 KB)
In this chapter, we summarize the main contributions of the thesis, and point out
some open problems and future research perspectives that we plan to tackle in the
near future.
|
|
Bibliography |
PDF (26 KB)
|
Last update 23/01/2007 |