|
El Robot
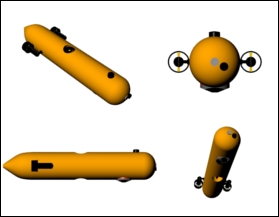
Para poder participar en la competición el robot debe ser totalmente autónomo, es decir, tiene que ser capaz de llevar a cabo la misión sin intervención humana. Por este motivo el vehículo también deberá transportar las baterías y los ordenadores de control. Además, también estará equipado con:
 3 propulsores 3 propulsores
Imaging Sonar
DVL (Doppler Velocity Log)
XSens MTi
Cámara submarina
Para desarrollar el software que gobernará el robot se usará:
Kernel 2.6 de GNU/Linux + patch para tiempo real RTAI
C++ using boost, Poco and OpenCV libraries
Object Oriented Control for Autonomy
|