|
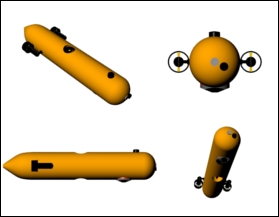
The Robot
To take part in the competition, the robot must be completely autonomous. Therefore,
it must be able to carry out the mission without human intervention.
For this reason, the vehicle will have to transport the batteries and the computers. In addition, it is equipped with:
 3 thrusters 3 thrusters
Imaging Sonar
DVL (Doppler Velocity Log)
XSens MTi
Underwater camera
To develop the software to control the robot we will use:
Kernel 2.6 de GNU/Linux
C++ using boost, Poco and OpenCV libraries
Object Oriented Control for Autonomy
|