|
El Robot
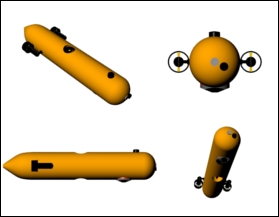
Per poder participar en la competició cal que el robot sigui totalment autònom; és a dir, ha de ser capaç de dur a terme la missió sense intervenció humana. Per aquest motiu el vehicle també haurà de transportar les bateries i els ordinadors de control. A més, també estarà equipat amb:
 3 propulsors 3 propulsors
Imaging Sonar
DVL (Doppler Velocity Log)
XSens MTi
Càmera submarina
Per a desenvolupar el software que governarà el robot s'utilitzarà:
Kernel 2.6 de GNU/Linux
C++ using boost, Poco and OpenCV libraries
Object Oriented Control for Autonomy
|