Next: Vision Up: Real Experiments Previous: Real Experiments
The robot used in the experimentation is an ActivMedia
![[*]](footnote.png) Pioneer 2 AT.
It is a 4-wheel drive all-terrain robot, equipped with a pan and tilt unit
with two B&W cameras.
It is also equipped with front and rear bumpers for collision detection.
The dimensions of the robot are 50
Pioneer 2 AT.
It is a 4-wheel drive all-terrain robot, equipped with a pan and tilt unit
with two B&W cameras.
It is also equipped with front and rear bumpers for collision detection.
The dimensions of the robot are 50![]() 50
50![]() 26 (in cm, length
26 (in cm, length![]() width
width![]() height).
The field of view of the cameras is of 45 degrees, and the pan/tilt
unit can pan from +150 (left) to -150 (right) degrees and tilt from
-90 (down) to +90 (up) degrees.
The robot is called MarkFinder, since its navigational skills
are based on finding landmarks in the environment.
Some pictures of the robot are shown in Figure 6.1.
height).
The field of view of the cameras is of 45 degrees, and the pan/tilt
unit can pan from +150 (left) to -150 (right) degrees and tilt from
-90 (down) to +90 (up) degrees.
The robot is called MarkFinder, since its navigational skills
are based on finding landmarks in the environment.
Some pictures of the robot are shown in Figure 6.1.
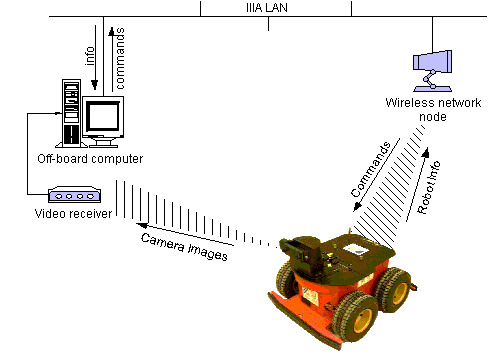
Although the final objective of the project we are involved in is to have a completely autonomous robot, we are currently working with off-board control and vision processing, as it is easier for programming and debugging our algorithms. We use a wireless Ethernet to communicate with the robot (to send commands to the wheels' and pan/tilt unit's motors, and to receive information about odometry and bumper activation), and the images are sent through a video transmitter (see Figure 6.2). To make the robot fully autonomous, we would only need to put the control and vision processing algorithms into its on-board computer, although it should still need to send some information back to an off-board computer for manually selecting the target.
The experimentation has been carried out in an
indoor unstructured (not office-like) environment, with easily
recognizable and controlled landmarks and obstacles.
The environment is an area of about 50![]() , containing ten landmarks
plus the target and a few non visible obstacles.
A difficulty in real environments is the vision system, as it is
highly sensitive to changes in the illumination, which makes it very
hard to detect objects. Therefore, we have developed a simple and robust
vision system that recognizes barcoded landmarks. Moreover, the
simplicity of the landmarks permits us to easily configure
scenarios with different complexity levels by changing their location,
as well as the location of the obstacles.
The vision system and the landmarks are described in the following section.
, containing ten landmarks
plus the target and a few non visible obstacles.
A difficulty in real environments is the vision system, as it is
highly sensitive to changes in the illumination, which makes it very
hard to detect objects. Therefore, we have developed a simple and robust
vision system that recognizes barcoded landmarks. Moreover, the
simplicity of the landmarks permits us to easily configure
scenarios with different complexity levels by changing their location,
as well as the location of the obstacles.
The vision system and the landmarks are described in the following section.