| Una vista general del comboi. Es tracta
d'una locomotora elèctrica i dos vagons. En el vagó groc
s'hi ha instal·lat un sistema microprocessat amb una sèrie
de sensors que més endavant explicaré. El vagó blau
està equipat amb bateries per alimentar el sistema microprocessat. |

|
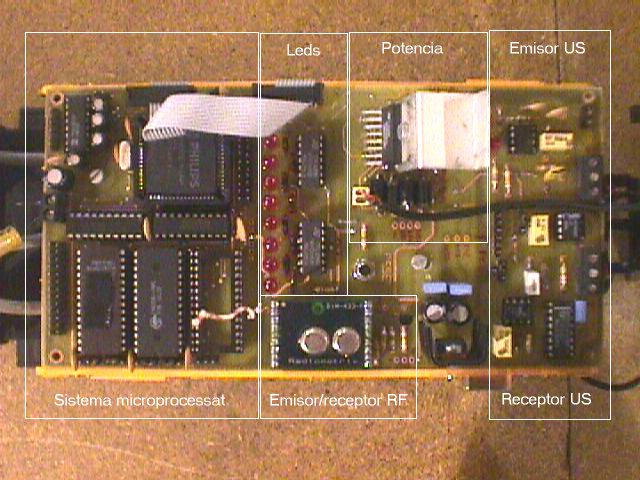
| Detall del sistema microprocessat. Es
tracta d'una plataforma amb un 80C552, una memòria ROM, una RAM,
un emisor/receptor de RF, una sèrie de leds, un sistema de potència
pel control del motor de la locomotora i un emisor/receptor ultrasònic. |
|
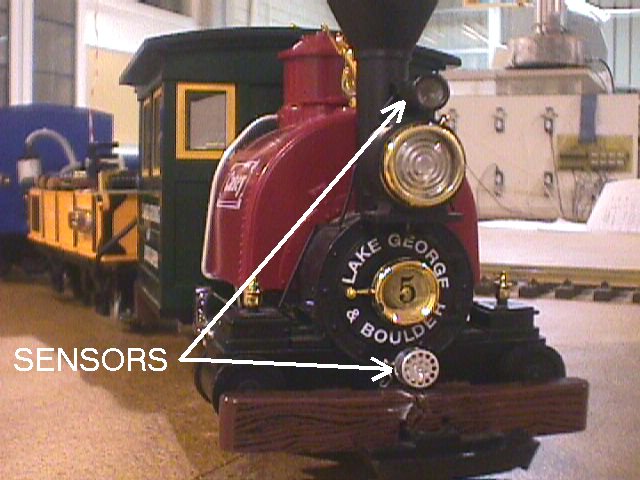
| Els sensors ultrasònics s'han instal·lat
al davant de la locomotora i s'usen en una de les pràctiques del
microprocessadors per tal de mantenir el comboi a una certa distància
d'un objecte. |
|
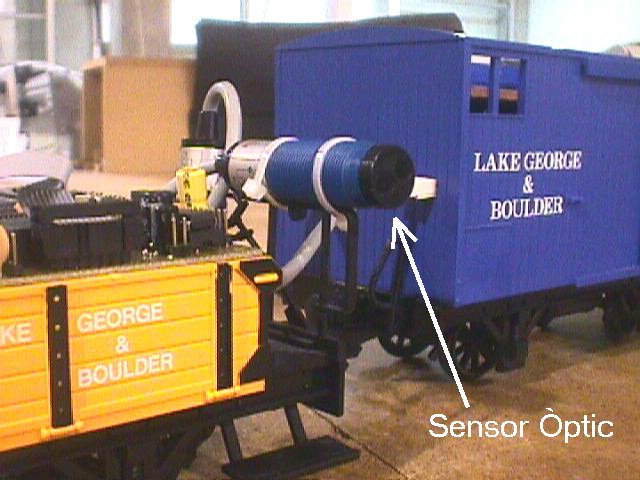
| Un altre sensor instal·lat en el
comboi és un de tipus òptic i també s'utilitza per
a pràctiques amb el microprocessador.
Aquest sensor capta qualsevol objecte que
es posi al seu davant i el seu abast és d'uns 3 cm. |
|
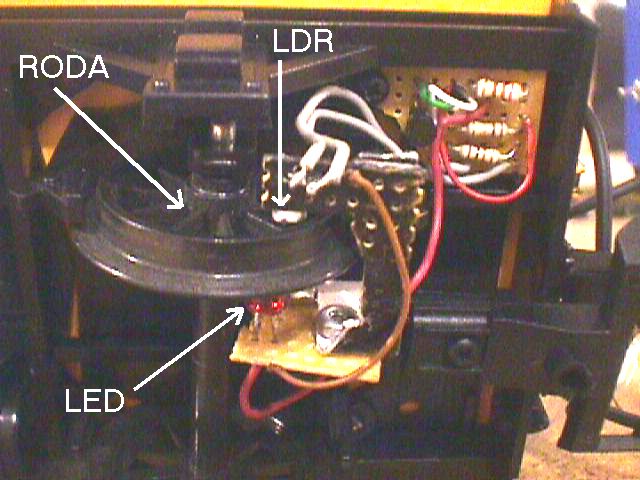
Per a realitzar una pràctica d'odometría,
vaig fabricar un sensor en una de les rodes del vagó microprocessat.
Es trracta de detectar el moviment de la roda.
Aprofitant que la roda té raigs,
es va col·locar un led i una LDR entre aquests. La LDR s'ha connectat
a un Transistor per tal de quadrar el senyal i aquest s'ha connectat a
una entrada d'interrupció del microprocessador. |
|
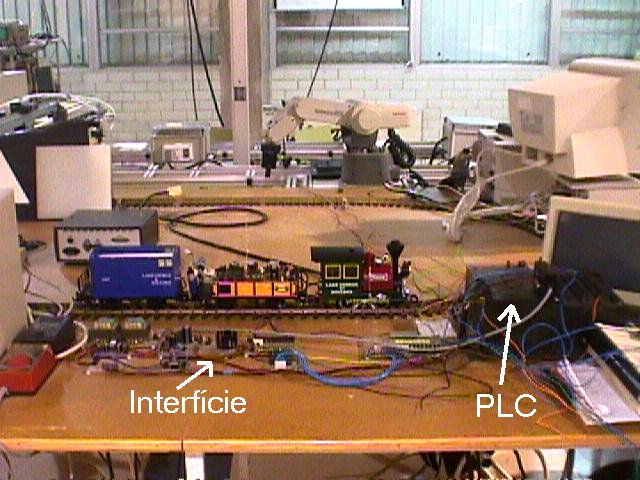
| En la imatge del costat, es pot observar
el sistema muntat que realitza la interfície entre els diferents
elements de control i la maqueta. Amb un simple canvi de connexions, el
sistema queda controlat per diferents dispositius. |
|
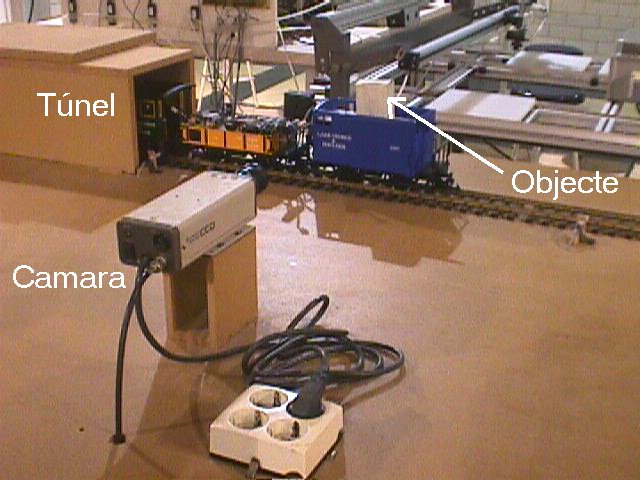
Una de les pràctiques de visió
artificial consta en controlar el pas del comboi per un túnel. S'ha
instal·lat una camara davant el túnel amb la qual es detecta
si el comboi va carregat o no.
El resultat d'aquest tractament informarà
al controlador de la tasca a realitzar.
També s'ha instal·lat una
segona camara al sostre amb la qual es realitza una segmentació
i un posterior seguiment del comboi. La dificultat es troba quan el tren
passa per dins el túnel. En aquest cas, un filtre de Kalman realitza
el seguiment amb les últimes dades obtingudes. |
|
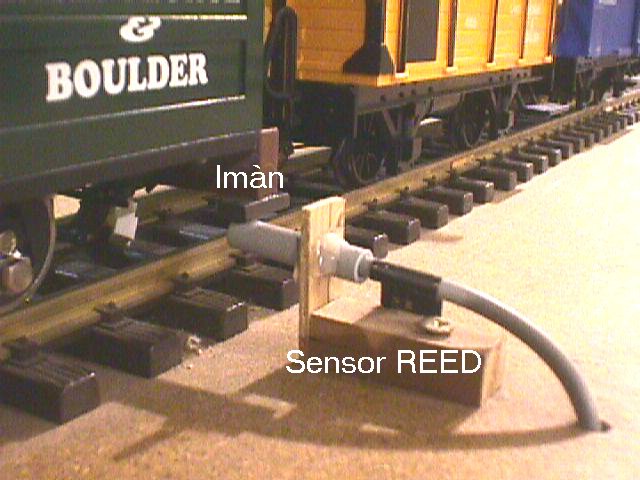
| Pel control de la posició del comboi
des d'un controlador extern, s'han instal·lat uns sensor tipus reed.
La locomotora porta enganxat, un iman que passa molt a prop d'aquests sensors. |
|
Finalment, amb l'ajud d'un braç
robot, es poden interconnectar ambdós sistemes per tal de realitzar
un control global.
La comunicació entre els sistemes
es realitza via TCP/IP. Amb el qual la pràctica necessita dels coneixaments
de moltes tecnologíes i que per tant, la fa molt complerta i didàtica. |

|