| Una vista general del comboi. Se trata
de una locomotora eléctrica y dos vagones. En el vagón amarillo
se ha instalado un sistema microprocesado con una série de sensores
que más adelante explicaré. El vagón azul está
equipado con baterías para alimentar el sistema microprocesado. |

|
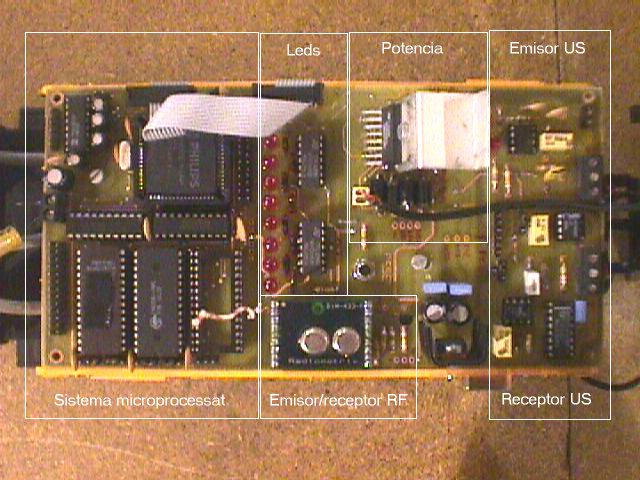
| Detalle del sistema microprocesado. Se
trata de una plataforma con un 80C552, una memória ROM, una RAM,
un emisor/receptor de RF, una série de leds, un sistema de poténcia
para el control del motor de la locomotora y un emisor/receptor ultrasónico. |
|
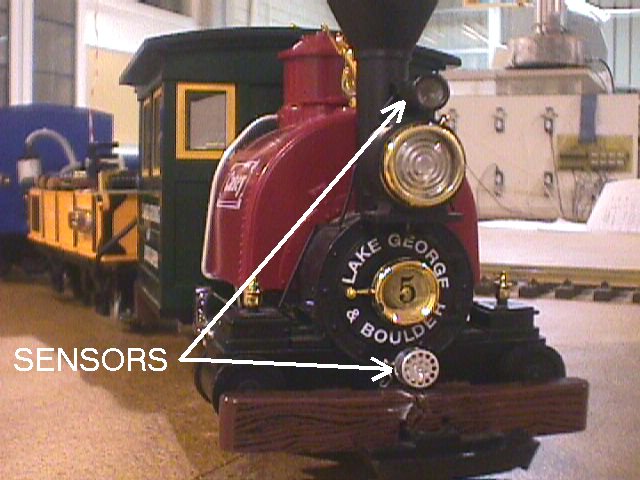
| Los sensores ultrasónicos se han
instalado delante de la locomotora y se utilizan en una de les prácticas
con el microprocesador para mantener el comboi a una cierta distáncia
de un objeto. |
|
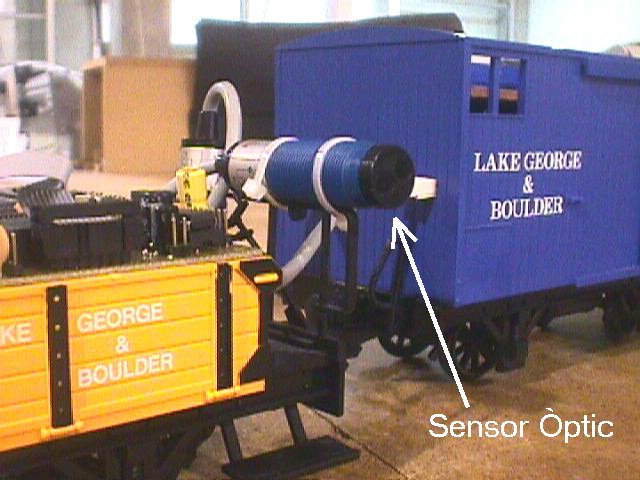
| Otro sensor instalado en el comboi es
uno de tipo óptico y también se utiliza para prácticas
con el microprocesador.
Este sensor capta qualquier objeto que
se ponga delante suyo y su alcance és de unos 3 cm. |
|
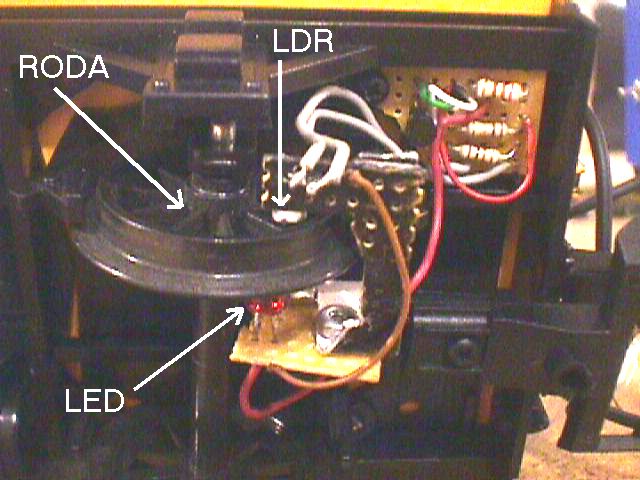
Para realizar una práctica de odometría,
fabriqué un sensor en una de las ruedas del vagón microprocesado.
Se trata de detectar el movimiento de la rueda.
Aprovechando que la rueda tiene radios,
se colocó un led y una LDR entre estos. La LDR se ha conectado a
un Transistor para cuadrar la señal y este sa ha conectado en una
entrada de interrupción del microprocesador. |
|
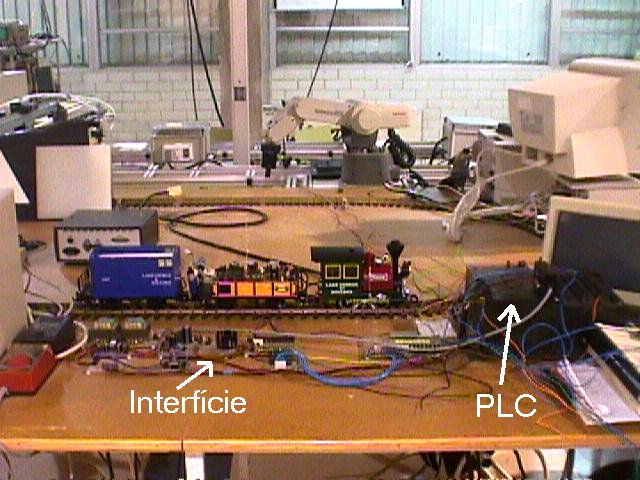
| En la imagen de al lado, se puede observar
el sistema montado que realiza la interfície entre los diferentes
elementos de control y la maqueta. Con un simple cambio de conexiones,
el sistema queda controlado por diferentes dispositivos. |
|
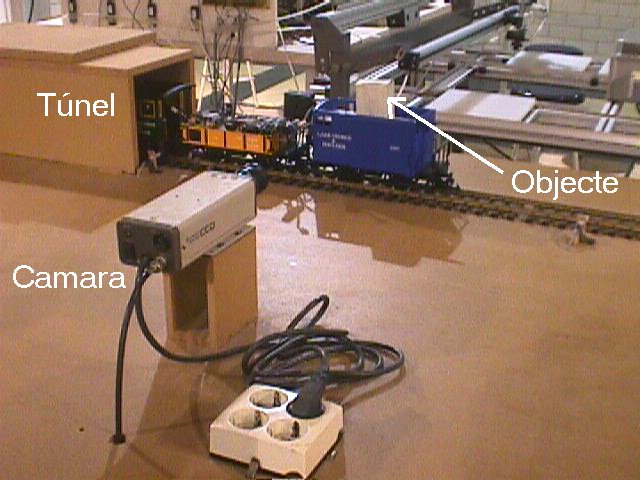
Una de las prácticas de visión
artificial consta en controlar el paso del comboi por un túnel.
Se ha instalado una cámara delante del túnel con la que se
detecta si el comboi va cargado o no.
El resultado de este tratamiento informará
al controlador de la tarea a realizar.
También se ha instalado una segunda
cámara en el techo con la que se realiza una segmentación
y un posterior seguimiento del comboi. La dificultat viene cuando el tren
pasa por el túnel. En este caso, un filtro de Kalman realiza el
seguiment con los últimos datos obtenidos. |
|
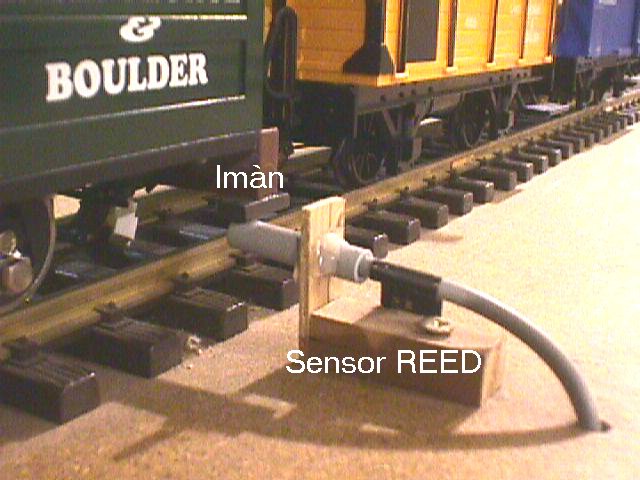
| Para el control de la posición
del comboi desde un controlador externo, se han instalado unos sensores
tipo reed. La locomotora tiene pegado un imán que pasa muy cerca
de estos sensores. |
|
Finalmente, y con la ayuda de un brazo
robot, se pueden interconectar ambos sistemas para realizar un control
global.
La comunicación entre los sistemas
se realiza via TCP/IP. Con lo cual la práctica necesita de los conocimientos
de muchas tecnologías y que por lo tanto, la hace muy completa y
didática. |

|