Next: The Group of Bidding Up: The Robot Architecture Previous: Visual Memory
This thesis has been mainly motivated by this system. We have used the modular view inspiring the overall robot architecture in the design of the Navigation system. The overall activity of leading the robot to the target destination is decomposed into a set of simple tasks. Working with simple tasks instead of using a single large module carrying out the whole navigation process is the basis of Behavior-based robotics. The idea is to divide the overall behavior of the robot into simpler behaviors, each one with its own goal, acting in parallel. These simpler tasks are much easier to build and debug than a larger module, since we only have to focus on separately solving smaller problems. Moreover, it permits us to incrementally increase the complexity of the robotic system, that is, adding new capabilities, by simply adding new behaviors, without having to modify already existing code. A detailed description of Behavior-based architectures was given in Chapter 2.
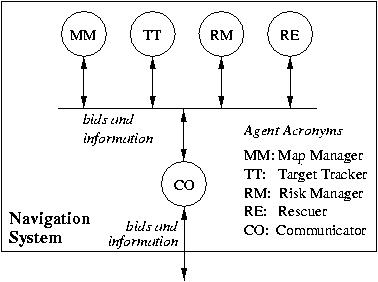
The Navigation system is defined to be a multiagent system where each agent is competent in one of these tasks (see Figure 4.4). These agents must cooperate, since an isolated agent is not capable of moving the robot to the target, but they also compete, because different agents may want to perform conflicting actions. Again, we use the bidding mechanism to coordinate the agents. Each agent bids for services provided by other robot systems (Pilot and Vision systems), and an additional agent, the communication agent, gathers the different bids and determines which one to select at any given time. This agent is also responsible of all the communication between the Navigation system and the other systems of the robot. The coordination between the agents is also made through a common representation of the map. Agents consult the map and the Pilot and Vision systems provide information about the environment --position of landmarks, obstacles -- which is used to update it.
The local decisions of the agents take the form of bids for services and are combined into a group decision: which set of compatible services to require, and hence, gives us a handle on the difficult combinatorial problem of deciding what to do next. In the next section we describe in detail the society of agents that models the navigation process.
© 2003 Dídac Busquets