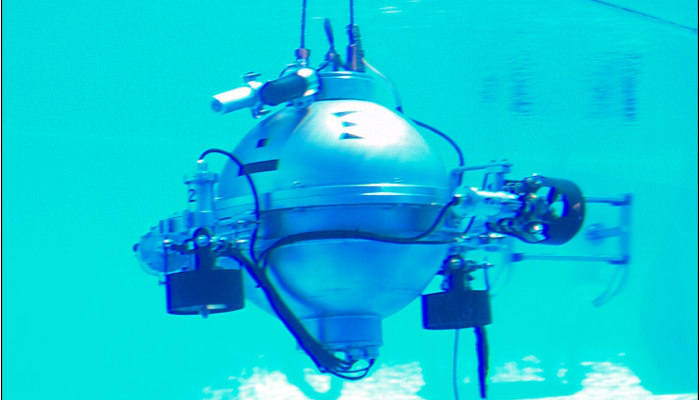
The URIS (Underwater Robotic Intelligent System) vehicle was designed with the aim of developing a small, light weight, low cost AUV to be used as a research testbed in a water tank testing facility. With URIS we expect that a single person will be able to run an experiment with the vehicle. Moreover, the vehicle is small enough to transport in a conventional car. This vehicle has been conceived as an AUV, hence it carries its own source of power, which gives about an hour of autonomy. The vehicle can also be powered by an external source using an umbilical cable. This option facilitates running long-term experiments. The hull has been designed as a sphere, see Figure 6-a. As a result, it offers equal hydrodynamic coefficients in any direction. There have been precedents with this shape, such as the ODIN AUV from the University of Hawaii-USA or the ROBIN robot from CNRIAN-Italy. The hull consists of two stainless steel hemispheres joined with wing nuts and bolts. The vehicle’s mass has been distributed in a way so that the centre of mass is below the buoyancy centre (as in the GARBI vehicle) making the vehicle passively stable in roll and pitch. Propulsion is achieved with 4 thrusters placed equidistant on the vehicle’s exterior, see figure 6. Due to the stability in pitch and roll, there are four degrees of freedom; X, Y, Z and Yaw. The vehicle incorporates a magnetic compass, a pressure sensor, water speed sensors, DGPS, water leakage sensors, computer vision and a laser-based 3D computer vision system (still in development). An on board Pentium PC 104 is in charge of the control of the vehicle’s sub-systems. A 80552 based microcontroller is used to reduce the computing load of the main computer in charge of peripheral computations. During the development, the optional umbilical cable is used to connect the on board computer to the surface computer where the development environment (Tornado/VxWorks) resides. The sphere radius is about 35 cm and the weight is approximately 35 kg.